PCMAG
Ambient Spatial Computing Robot — Intel Labs Industrial Design
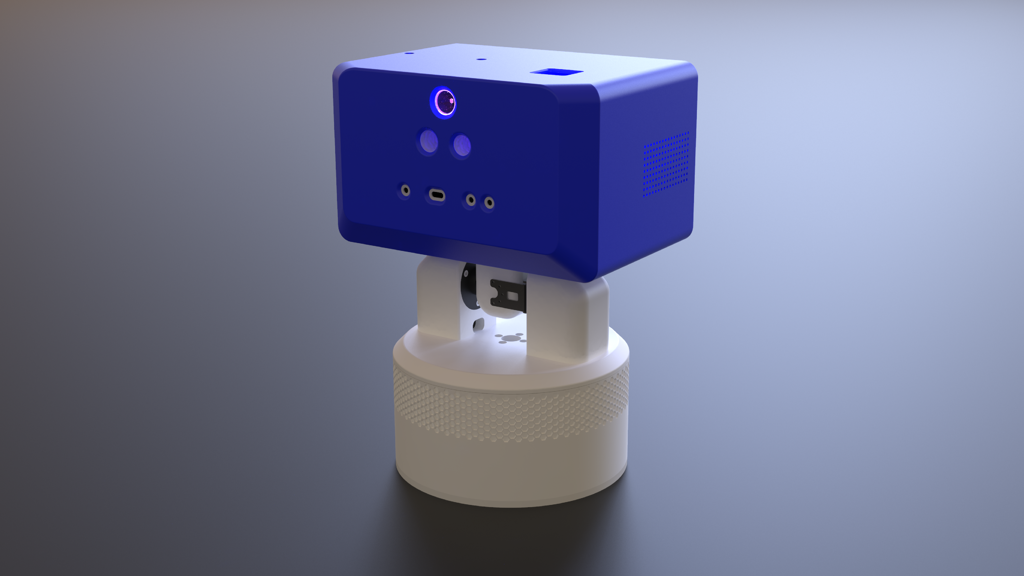
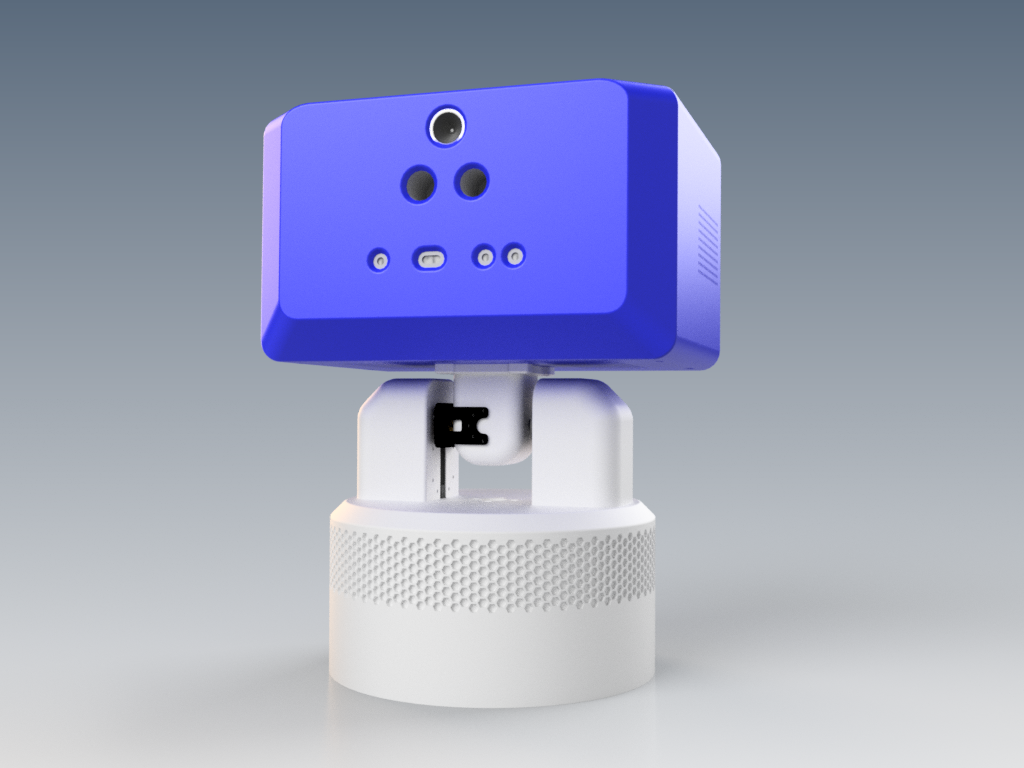
PCMAG is a desktop robot that employs Intel's RealSense, a LIDAR, and a laser projector for the purposes of displaying interactive visuals in uncharacterized environments. More precisely, this robot gets placed in a living room, a bedroom, or a playroom and will spin on its axis to map the environment in order to build a 3D map that it will then use to display characters and other interactive elements on walls and surfaces. This device was used to showcase possible scenarios for smart spaces and ambient computing.
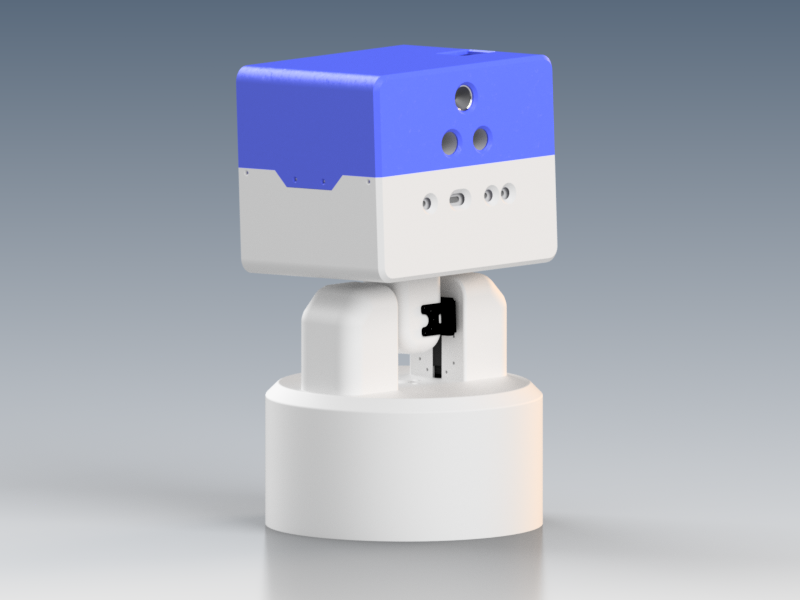
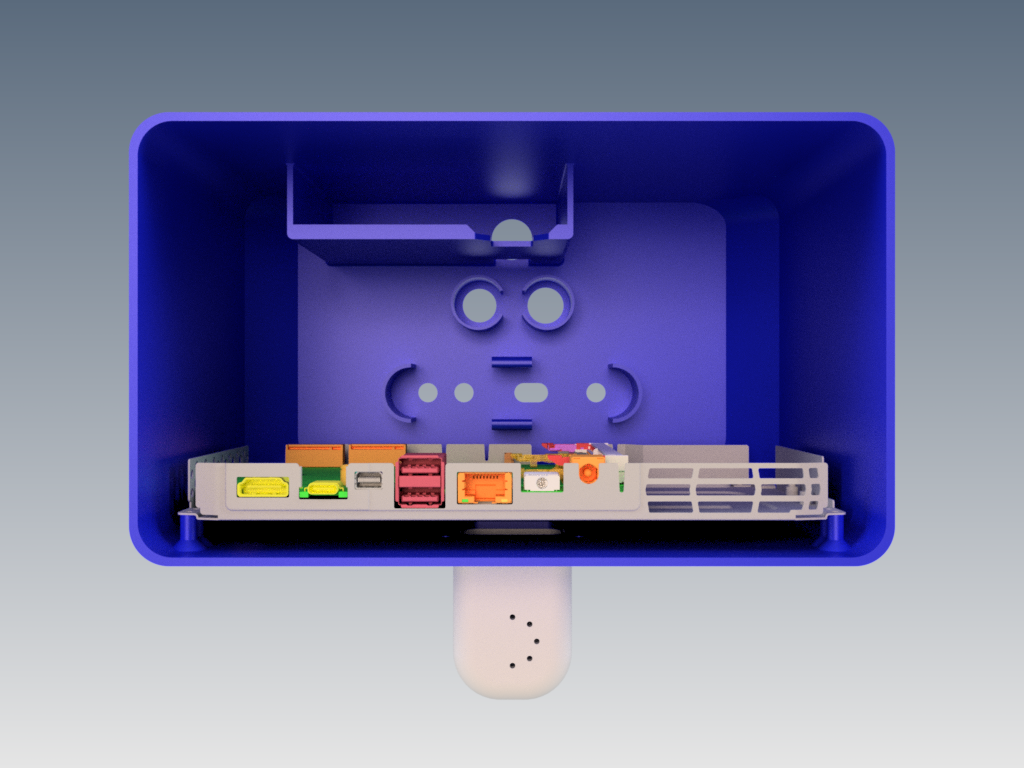
These are two of five different versions of the device that I designed both the surface and mechanical design for. The primary requirement was that the device be able to rotate horizontally 360 degrees and continuously, which required a bespoke gimbal and wiring configuration to mitigate gear stuttering and allow for a smooth visual experience.